Bill Zurn was inspired to develop a road repair machine patent after being frustrated by all of the potholes on the freeways & city streets. He postulated that a more efficient method of repairing roads was possible by adding robotic modules and computer controlling methods to repair machines.
Robotics and Roads
William Zurn & Davel Foote | IpAuctions
With his training and experience, he developed a patent combining robotics with road repair equipment. A Robotic Road Repair Machine or RRRM. The advanced, full-automated technology provides a cost effective, quicker, and safer system for asphalt and concrete surface repair. The technology comprises an automated, modular, and wheeled road repair machine, including a vehicle with slots designed to receive work modules. The technology analyzes and repairs surface imperfection in road surfaces and sub-layers. The RRRM completes multiple repair tasks as it moves over the surface of the road. The deployment vehicle is self-contained and controlled by a complex central computer. The critical element of this master machine is the computing operating system technology: the technique of communicating to the robotic modules, controlling them, and the integration of the interchangeable robotic module hardware into the overall machine.
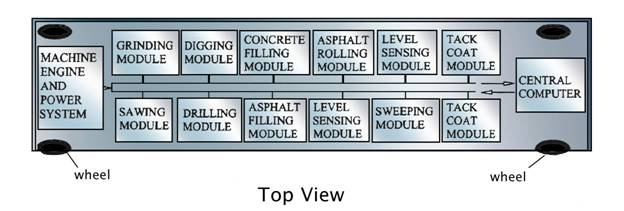
With several interchangeable work modules, multiple construction or repair functions are provided within a single vehicle. The RRRM includes an automated deployment vehicle with multiple slots designed to receive different work modules. The work modules may be interchanged among various slots in the deployment vehicle. The work modules have different functions, including:
- Radar/seismic readings
- Sawing/cutting
- Drilling
- Asphalt filling
- Level sensing
- Concrete filling
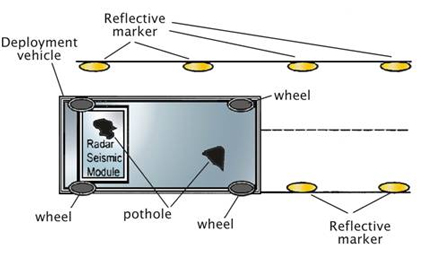
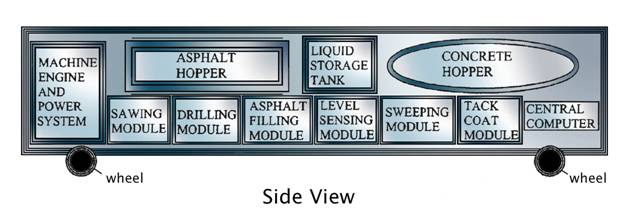
The deployment vehicle is guided by a positioning device, to place the machine above every position of the road surface that needs to be repaired. The machine uses data from seismic or radar analysis carried out in a survey phase for repairing the road surface with the use of modules within the machine. The deployment vehicle is capable of moving and positioning itself, without the need for external power. The machine not only positions itself, but also analytically adjusts the positioning of each of the separate robotic modules over the areas to be repaired. Thus, the technology can perform more than one function at a time, possibly three or more functions at once. An advanced computer governs operation. The deployment vehicle has hoppers, in which the asphalt/cement is loaded as required. The machine uses advanced radar, seismic technology modules to analyze the road surface with respect to the defects in need of repair.
The technology includes generating an electronic map of regions of a road surface to be repaired and to control work processes based on this model. The electronic map is generated from readings taken during the surveying phase. The method may also include placing markers along the road surface to be repaired, (see diagram) prior to surveying and repair operations. The markers provide reference points for the vehicle during operations.
This analysis scans for irregularities, bumps, cracks, voids, and cavities in preparation for repairing the road surface by the use of robotic modules within the machine. This technology can also be used to build new roads, racetracks, airport runways, sidewalks, driveways, parking lots, etc. Multiple construction or repair functions are provided within one machine.
Bill Zurns’ design allows for the user of this patent to integrate the computer technology of choice to be used as well as the ability to perform multiple functions within the operating parameters of the machine.
- Multiple construction or repair functions are provided within one machine
- Uses advanced radar and laser technology for positioning
- Dedicated work modules may be interchanged to optimize functioning
- Simultaneous repair operations capability
- Labor savings
- Vastly improved safety
- Increased efficiency
- Versatile, modular technology
- Enhanced analysis compared to the long-established methods of visual assessment
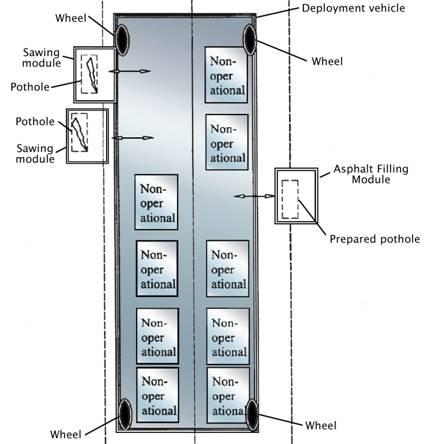
The figures below show the machine performing repair operations as well as possible placement of modules. The sawing modules are sawing into the asphalt over two potholes simultaneously. The asphalt-filling module is filling the pothole below its module. The modules have been moved outside of the main structure by robotic arms to perform these operations.
About William Zurn:
Bachelor’s Degree in Business Administration and a Master’s Degree in Engineering Management from Santa Clara University. He is now the principle of Alpha IP specializing in patent consulting, development and coaching services.
The companies & positions in the high technology business:
Product Mktg. Manager at Actel
Product Mktg. Manager at Credence Systems Corp.
Product Mktg. Manager at Digi International
The content & opinions in this article are the author’s and do not necessarily represent the views of RoboticsTomorrow
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

