Chinese cars in motion thanks to Stäubli connectors

Stäubli's MPS tool changer provides JAC with flexibility and minimal technician intervention during the manufacturing process, particularly during the handling and welding processes. Water, air and electrical circuits can be connected and disconnected simultaneously.
Multi-couplings reduce down time and improve efficiency

The multi-coupling system helped Eaton cut down on the time needed for switching hoses and connections by almost 40 percent.
The Ultimate Guide to GPU Computers

The GPU is constantly evolving, and not just for gaming or 3D graphics for product design, but it is increasingly be tasked with supporting machine learning and AI inference analysis through its parallel processing with the ability of simultaneous multiple computations.
Best PC for Smart Warehousing and Logistics - How to Choose

When researching the best PC for smart warehousing and logistics, you might have a specific spec you're trying to meet or processing capability you're looking to achieve. You're also likely looking for a computer that is better, faster and more reliable.
What IS an Encoder?
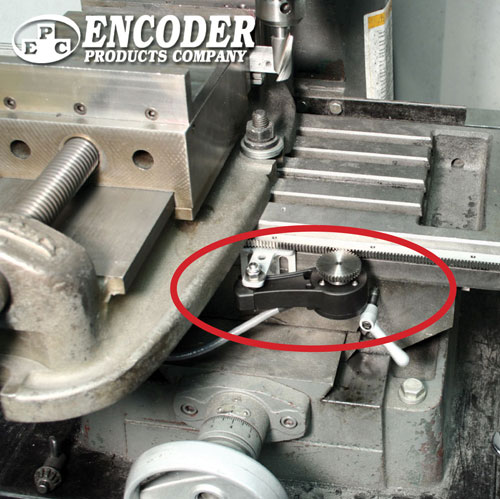
Encoders use different types of technologies to create a signal, including: mechanical, magnetic, resistive and optical - optical being the most common.
Added Value From An Ejector With Integrated Controls?

Air-driven ejectors are gaining pace as the vacuum source for suction cup handling equipment on robots and special purpose machines (ex: case/carton erectors, de-stackers, unloading equipment, etc.)
Design With Touchless Rotary Sensors
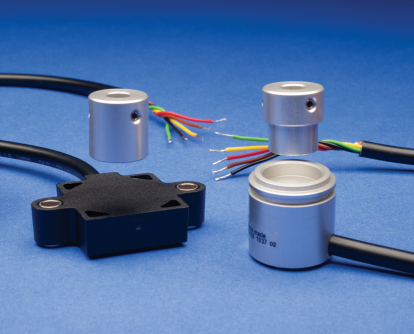
Touchless rotary sensors are position sensors that use a position marker attached to an applications rotating part plus a sensor to measure the markers angle.
Cable Carriers for Rotary Applications

Here are three different types of rotary applications and the cable carrier system used for each.
How Trends in Electronics are Affecting Connectors

New smaller and more portable electronics in aerospace, defense, and other stressful environments, like those encountered in robotics and oil exploration, are resulting in changing demands and designs of electronic connector systems.
Beta Testing Dynamixel XL-320 Servos
.jpg)
Dynamixel XL-320 is a digital servo (in this case, featuring a 8-bit STM8 controller).
What to Look for When Specifying a Robot Cable

In order for a cable to withstand repeated torsional movement, its necessary for the cable to have a special design. Its important that the conductors, shield construction and jacket materials of the cable compensate for major changes in bending load and diameter.
Interview with Jim Gruszczynski of Nabtesco Motion Control
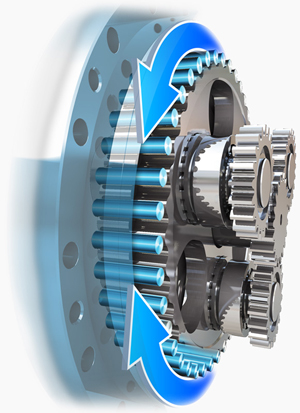
In the near future the more advanced the equipment becomes we must produce more skilled labor. This is great benefit to the US in that companies themselves will be helping educate their employees and improving the workforce.
The Less is More Approach to Robotic Cable Management

There are different options available for guiding and protecting cables on six-axis robots. Three well- known solutions include flexible tubing, enclosed dress packs and robotic cable carrier systems.
A BeagleBone Black Resource
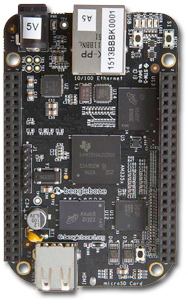
The BeagleBone Black is the latest low cost single-board computer in the BeagleBoard family.
Vacuum Systems For Successful Robot Implementation

The design of a vacuum system and choice of vacuum components for robot end effectors can be of crucial importance for a successful robot installation. This paper discusses vacuum solutions for robot end effectors, which increase the possibility of a successful robot installation. At the same time, I would like to resolve the misunderstanding that all vacuum ejectors are expensive to operate.
Records 1 to 15 of 23
Featured Product

The maxon IDX Compact Drive with Integrated Positioning Controller
The compact brushless EC-i motor combined with an EPOS4 positioning controller delivers a highly dynamic, powerful drive package with field-oriented control (FOC), high efficiency, and maintenance-free components in a high-quality industrial housing. The maxon IDX drives are suitable for use across the entire speed range (from standstill to maximum speed) and have an extremely high overload capability. Together with a positioning controller, the integrated sensor (single turn) enables absolute positioning.
