

High-performance 3D sensing using wide-baseline camera arrays
NODAR is accelerating mass-market autonomy through the development of 3D vision systems based on untethered, wide-baseline camera arrays and NODAR software
Autonomous vehicles require realtime, accurate, reliable long-range 3D sensing to safely navigate their environments. NODAR’s patent-pending Hammerhead™ platform shatters performance benchmarks previously thought unattainable and promises to deliver new levels of safety to driver-assisted and fully autonomous vehicles.
Nodar Hammerhead™
Autonomous vehicles require 3D vision to understand what lies ahead and to give the vehicle enough time to plan a safe path given a complex and changing environment. The 3D vision system needs not only to be able to “see” hundreds of meters in front of the car but also to detect small, often unknown objects well in advance of a possible collision with limited onboard computing resources.
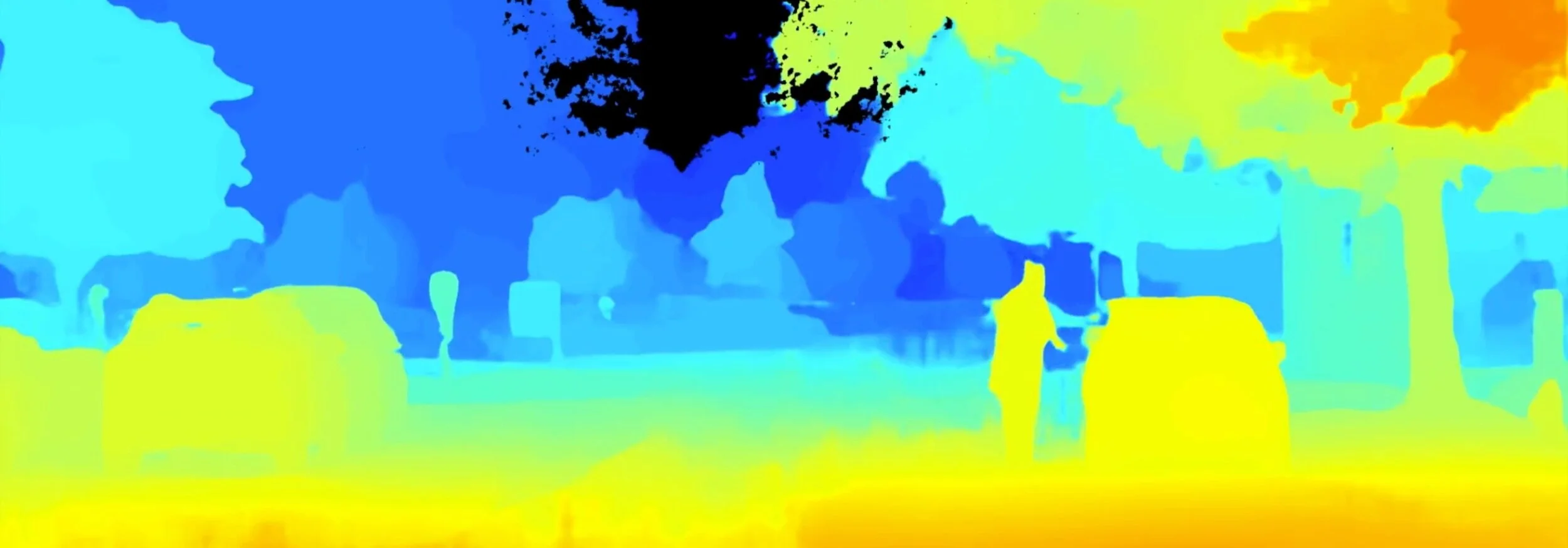
Introducing NODAR Hammerhead™, a breakthrough 3D vision platform providing ultra-high fidelity depth maps at ranges up to 1,000 meters. With Hammerhead™, a vehicle’s perception system will not only be able to see other vehicles but also dangerous objects as small as a 10-cm brick 150 meters away.
Hammerhead™ Benefits

Long-Range 3D Sensing
Wide-baseline camera placement enables long-range (up to 1,000m) highly accurate 3D sensing and the ability to detect small objects at a distance

Industry Standard Cameras & Compute
Nodar Hammerhead ™ provides industry-standard cameras and computing hardware to provide ultra-high fidelity depth maps at ranges up to 1,000 meters.

Unconstrained mounting of cameras
Untethering of cameras allows them to be mounted in headlights, behind a windshield, on the side of a garbage truck, or in the cab of a harvester.

High-performance
Leveraging today’s high-resolution CMOS, cameras and dedicated computer vision silicon, NODAR outputs 1280x720 pixels @20 FPS.
Featured On




