RASC-AL Exploration Robo-Ops Competition (i.e., Robo-Ops) is an engineering competition sponsored by NASA and organized by the National Institute of Aerospace. In this exciting competition, undergraduate and graduate students are invited to create a multi-disciplinary team to build a planetary rover prototype and demonstrate its capabilities to perform a series of competitive tasks in field tests at the NASA Johnson Space Centers Rock Yard in June 2013.

We were fortunate to be given the opportunity to show off some of the leading entries into the RASC-AL Exploration Robo-Ops Competition. Here are 5 of the design reports:
Worcester Polytechnic Institute
University of Nebraska-Lincoln
FAMU/FSU College of Engineering
Team Members:
Andrew Cunningham, Velin Dimitrov, Quan Peng, Cody Shultz, Jivesh Tolani, Jacob Zizmor, David Kelly, Nicholas Otero, Batyrlan Nurbekov, Ran Li
Faculty Advisors:
Profs. Taskin Padir, Brad Miller, Ken Stafford Affiliation: Worcester Polytechnic Institute, 100 Institute Rd., Worcester, MA
Background and Prior Experience
Team Oryx consists of one graduate and nine undergraduate students from the Robotics Engineering Program at Worcester Polytechnic Institute (WPI). The team competencies include robot kinematics, mechanism design, CAD, manufacturing, electronics, sensor integration, advanced programming, robot localization, mapping, and path planning. Two of the team members are veterans from prior Robo-Ops competitions, and bring with them expertise and lessons learned through their participation in the previous rover design challenges.
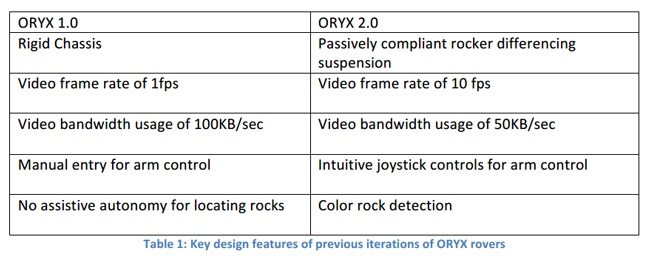
Since WPI’s successful participation in the 2011 and 2012 Robo-Ops challenges, the WPI community has continued to pursue space exploration robotics, and we have gained experience in planetary rover design that will be applied to this year’s entry. While WPI’s previous two entries were successful and took first place, Team Oryx has found areas of improvement based on the rover’s performance at the Johnson Space Center (JSC) Planetary Analog Test Site, the “Rock Yard”, and come up with new and innovative approaches to meet the challenge.
For the 2013 Robo-Ops competition, Team Oryx proposes ORYX 2.1 with an integrated micro-rover. ORYX 2.1 will incorporate many of the advancements that debuted in ORYX 2.0, but will have a smaller footprint while reducing overall weight. These improvements will allow Team Oryx to integrate the new micro-rover with the ORYX rover, while adhering to the Robo-Ops design requirements. The micro-rover will provide a mobile camera platform to ORYX 2.1, enabling advanced scouting and rover inspection capabilities.
Team Oryx has access to WPI’s well-equipped robotics teaching and research laboratories, machine shops, electronics shop, and Academic Technology Center for software tools. Using these resources the team can quickly prototype, test and finalize the rover design. The team plans to use an analog platform for software and electronics development during the manufacturing of the rover. Team Oryx has the required skill set and resources to design and manufacture a planetary rover to meet the design requirements for the RASC-AL Exploration Robo-Ops competition and also execute extensive public outreach. Lessons Learned Team Oryx’s approach to the Robo-Ops competition in 2012 and 2011 left much of the JSC Rock Yard unsearched. To expand the area searched in the allotted time, a secondary microrover is proposed to scout for rocks while the primary ORYX 2.1 rover collects samples. This secondary rover will be:
- Driven Independently of ORYX 2.1 after deployment
- Capable of traversing all required areas of the Rock Yard
- Capable of finding and identifying rock samples
Team Oryx will also be using expertise gained from participating in previous competitions to create ORYX 2.1 with the following design improvements. ORYX 2.1 will:
- Use a 4G LTE network to communicate with WPI. Past experiences have shown that using the 4G network with dual antennas at the JSC Rock Yard provides a better connection with lower latency and higher bandwidth.
- Have a two degree-of-freedom serial manipulator with bucket end effector with intuitive joystick controller. It is reliable and simple, something that has worked well in past competitions.
- Incorporate a redesigned camera boom with actuators to raise it upon deployment. The camera boom will be shorter than in previous years to reduce the oscillations experienced by the camera when the rover rocks back and forth.
- Have redesigned wheels that will be lighter and provide more traction across the multitude of surfaces experienced at the Rock Yard.
- Have LiFePO4 batteries with a reduced capacity compared to previous years. Competition experience has the rover will not operate at full duty cycle for the entire duration of the competition, requiring smaller capacity batteries. This in addition to replacing the sealed lead acid batteries reduces the battery weight by approximately 60%
- Have a ROS based software architecture allowing for easier system integration with secondary micro rovers.
The WPI Micro-Rover Project
Inspired by the utility of micro-rovers in planetary exploration applications, four students decided to propose the design and construction of a planetary micro-rover to fulfill the requirements for their senior capstone design project. This project aims to create a microrover (rover with weight under 2.5Kg and an initial size of less than 31cm x 31cm x 31cm) capable of integrating with the primary rover’s systems and supporting the mission objectives. Tailoring the micro-rover for use with ORYX 2.1 in the Robo-Ops competition fulfills these goals.
This project, along with ORYX 2.1, will provide the basis of Team Oryx’s new approach to the Robo-Ops competition. Underway since August 2012, the project is currently in the manufacturing stage with its design nearing completion. Team Oryx has also been successful in soliciting assistance from sponsor Maxon Motors who is contributing components for use in the micro-rover.
ORYX 2.1
The key features and components of ORYX 2.1 can be summarized as follows:
- A differential drive rover base with four 30cm wheels
- Skid-steering by four direct driven DC motors
- A 2 degree-of-freedom robot arm with bucket end effector
- Boom camera for viewing the field
- Drive camera (front) for operator feedback and viewing the rover workspace
- Optical wheel encoders for monitoring motor speeds and estimating distance traveled
- Optical motor encoders for measuring robot arm joint angles
- A quad-core i5 processor as the on-board controller for image processing and semiautonomous navigation
Micro-Rover Mechanical Design
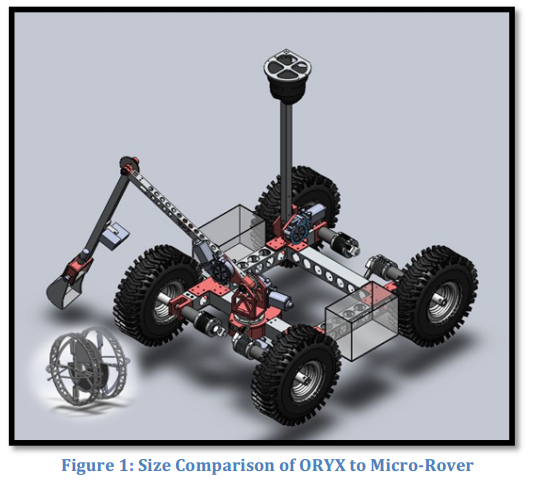
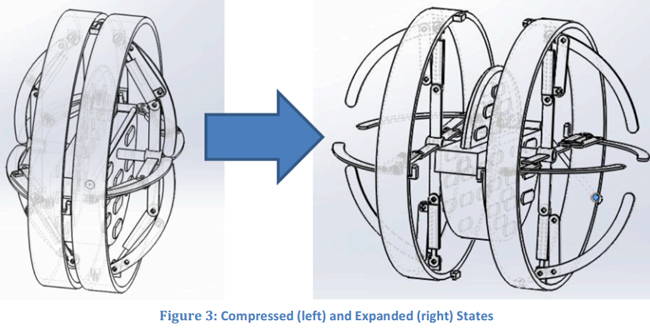
Figure 2 and Figure 3 show the proposed design for the micro-rover.
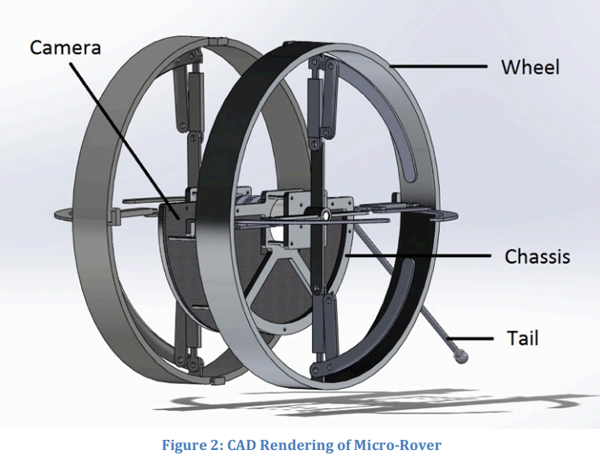
Two large hemispherical wheels, attached to its semicircular chassis, drive the micro-rover. The wheels have a diameter of 30cm, and are constructed with bar linkages that allow the micro-rover to be compressed initially and expanded after deployment, as shown in Figure 3. The camera is mounted in the chassis parallel to the ground. On the rear of the chassis, opposite the camera, a cylindrical tail is attached to the chassis to provide stabilization for the rover while accelerating and climbing hills.
The spherical shape of the micro-rover gives it the ability to be deployed at any angle. The center of mass is kept low to the ground so that gravity forces the micro-rover to recover to its nominal orientation with respect to the ground.
ORYX 2.1 Mechanical Design
To stay underthe specified Robo-Ops 45 kg weight limit, ORYX 2.1 has a chassis made from aluminum with a density is 2.70g/cm3. The maximum speed will be 1m/s for the rover to cover the competition field and collect at least 15 scattered rocks in one hour. Since the rover should be able to operate in light rain conditions, all electronic parts will be sealed in a waterproof shell. All the gears will be enclosed in dustproof casingsin order to avoid damage to the gearboxes. In order to pick up rock samples and place them in a payload bay contained on top ofthe rover, the arm of the robot is designed with 2 degrees of freedom. The design allows for ease of control, while still providing ample range of motion. The pan mechanism under the arm gives it the ability to pick up rocks located 270 degrees around the robot without moving the rover base. The end-effector of arm is designed to be a bucketscoop, which is both easy to operate, and effective at picking up rocks. The scoop will be slotted with holes to allow excess dirt to flow out of the griper.
ORYX 2.1 Vision Capabilities
ORYX 2.1 will be equipped with two Axis network cameras – a P55 and a M1011. The P55 will be mounted on the extendable boom to help the operators detect rocks with a broad view. The 48x zoom ability ofthe P55, coupled with the pan-tilt mechanism enablesthe operatorto flexibly observe the field. The M1011 will be attached on the front of the rover overlooking the scoop to give the operator the ability to see what happens while ORYX 2.1 is picking up rocks. Due to the bandwidth limitations, the rover willstream video from one camera at a time to get higher frame rate video compared with streaming multiple atthe same time. The GUI will enable the operator to easily switch between cameras.
Micro-Rover Vision Capabilities
The camera for micro-rover will be used for navigation and scouting points of interest or close-up inspection of targets. A HD camera is idealto accomplish these tasks. Frames can be down-sampled while driving for faster processing. When there is a point of interest, a full resolution image can be transmitted to verify the point of interest without getting closer to it. This is advantageous when the potential point of interest is located in an area potentially hazardous for the micro-rover.
ORYX 2.1 Drive-Power Systems
Each wheel in ORYX 2.1 has an independent set of MAXON motors, gearboxes, drivers and controllers. These motors were selected to enable the rover to climb a 30% grade, while enabling the ORYX 2.1 rover to travel at speeds in excess of 1m/s.
ORYX 2.1 will be powered by a new, lightweight, 24V battery that will allow the rover to operate effectively over the one-hour period, while allowing space and weight for the microrover. This battery will power both the onboard electronics, as well as the selected MAXON motors.
Micro-Rover Drive-Power Systems
The motors selected for the micro-rover must be capable of meeting the torque and speed requirements of the rover, as well as being compact in physical size and completely enclosed to minimize dust and debris entering the motor housing.
The base torque specification for the motor is derived from the requirement to climb a 33% grade on earth given the rover’s geometry. To meet these requirements, a system including a 30W MAXON motor and controller, as well as a 47:1 gearbox was selected. The motor and gearbox assembly is enclosed to prevent interference from dust and debris, and is the shortest possible mechanical length and weight for the given requirements.
To provide the necessary power to actuate the motors, as well as power the electronics, a 12.8V 84Wh battery will be used. This will provide power in excess (safety factor of 2) of what is necessary to operate for the 1 hour Robo-Ops requirement.
Programming and Communications
On the client computer side, the operator will have a Graphical User Interface (GUI) (shown in Figure 4) and a joystick to control the ORYX 2.1 rover, and a second separate computer GUI to control the micro-rover.
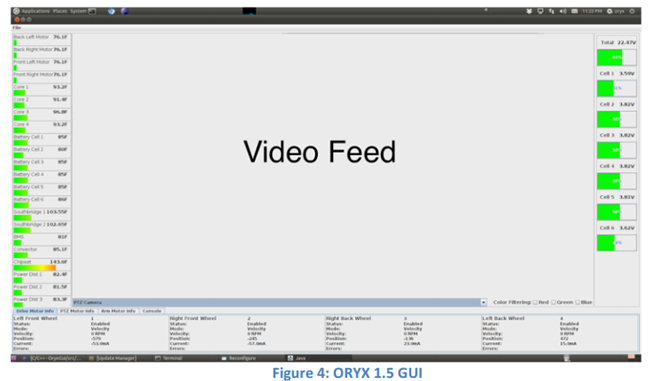
The GUIs will consist primarily of a window showing the video stream., ORYX 2.1’s GUI will also have the option to switch camera views between the boom camera and the forward facing drive camera. To drive ORYX 2.1, control the camera boom, and control the arm, the operator will use a XBOX 360 joystick. To control the micro-rover we will also be using a XBOX 360 controller with tank steering to operate the two-wheeled rover. Overall, some autonomy combined with continuous human-in-the-loop control will make the ORYX 2.1/micro-rover combination easy to drive and efficient at locating and collecting rock samples.
Each rover will use an inertial measurement unit (IMU) to provide orientation and acceleration data to the operator. IMUs are able to measure acceleration and orientation through a set of accelerometers, gyroscopes, and, magnetometers. By combining and filtering the data received from all three sensors, we can get accurate positioning data for the rover. We will use this data to create a slope monitoring system, for both rovers, to provide a warning if a rover approaches a dangerous orientation angle. By using the acceleration and heading information from the on-board IMUsin conjunction with data from the wheel encoders we will be able to give position updates of each roverto the operator. This allows the operatorto give ORYX 2.1 an accurate heading to travel when the micro-rover finds a sample.
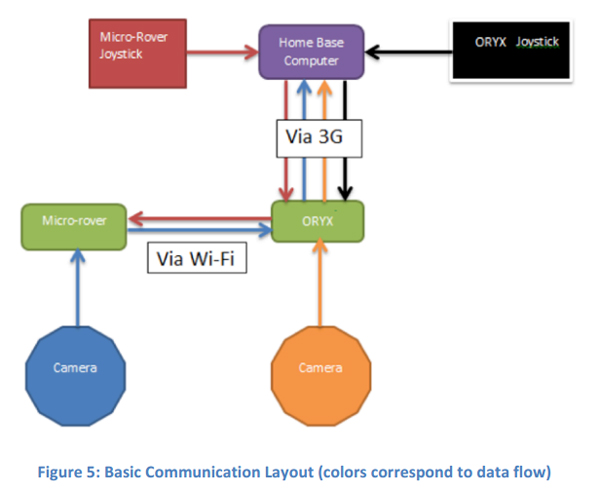
Communication between ORYX 2.1 and the micro-rover with the control base will rely on a few different channels. ORYX 2.1 will rely on Verizon 3G/4G to send data to and from the control computer located at WPI.ORYX 2.1 will also be a relay for all communications (joystick input, etc.) between the micro-rover and home base.ORYX 2.1 and the micro-rover will communicate between each other using an ad-hoc Wi-Fi connection. (See Figure 5 for basic operation).
Meeting the Design Requirements
This section briefly summarizes how the design for WPI’s planetary rover ORYX 2.1 and integrated micro-rover meets the design requirements outlined by the competition rules.
The design meets the size requirements, by fitting within a 1m× 1m × 50cm space in the collapsed configuration.
A detailed weight analysis based on the CAD model estimates the combined weight of ORYX 2.1 and the micro-rover to be 43kg, providing a margin of 2kg below the 45kg limit.
A ground clearance of 12cm combined with 30cm wheels will allow ORYX 2.1 to easily traverse over 10cm obstacles. The micro-rover’s ground clearance of 10.5cm will allow it to also traverse over 10cm obstacles
Based from the wheelbase, center of gravity, and drive motor torque, ORYX 2.1 will be able to operate on slopes above the 33% grade requirement with sufficient. The micro-rover’s tail in conjunction with the motors will allow for it to travel on slopes at a 33% grade.
The simple and robust arm and scoop design will enable ORYX 2.1 to pick up rocks with diameters ranging from 2 to 8 cm and masses ranging from 20 to 150 grams.
With its wide wheels, ORYX 2.1 is capable of traversing sand with no appreciable slope, without sinking, for a distance of at least 20 feet. The lightweight micro-rover with its unique wheel design will be able to traverse the sand as well.
Based on a detailed analysis of estimated power requirements, the 15 Amp-hour batteries can sustain operation for approximately 1 hour, allowing Team Oryx to operate for the duration of the competition period without recharging. The microrover can be operated for over an hour using its 6.6 Amp-hour batteries
The weatherproof design of ORYX 2.1 and the micro-rover will enable the rover to operate under light rain.
The control architecture and sensor systems will enable the operator to control the rovers remotely based solely on information including video, gathered from the rover itself.
Public Outreach
The WPI Robotics Program and team Oryx both have the goal of teaching the public about the field of robotics, as well as participating in activities, to help the public experience the growing robotics industry first hand. WPI supports the FIRST (For Inspiration and Recognition of Science and Technology) robotics program, provides online resources, and hosts robotics competitions, providing an opportunity for students of all ages to participate in robotics and engineering. These competitions include FIRST Robotics Regional, Battle Cry, Savage Soccer, Robonautica and the FIRST Lego League State Finals. Team Oryx will use the events, sponsored by WPI, to promote and demo both Oryx 2.1 and the micro-rover system, allowing the public to interact with the robots first hand.
WPI also hosts the NASA Sample and Return Robot Challenge, an event specifically tailored towards increasing awareness of space exploration and robotics. In conjunction with the Sample and Return Robot Challenge, WPI will host TouchTomorrow, a massive WPI robotics public outreach event which last year attracted over 7000 attendees. TouchTomorrow, as well as the NASA Sample and Return Robot Challenge, occur at the same time as the RoboOps competition, which will provide us with a large audience for our live stream from the JSC Rock Yard. The WPI control station will be a part of the TouchTomorrow outreach program, giving the public an opportunity to watch the competition in real time, as well as the chance to operate the rover at JSC before or after the competition.
Team Oryx is also involved in other public demonstrations and events. This year, our team will be participating in the Cambridge Science Festival, where we will have an opportunity to demonstrate our rover’s capabilities to more than 6000 people. The team has and will continue to demonstrate the rovers at public events and has created a web presence on Facebook, as well as at http://robot.wpi.edu/microrover.
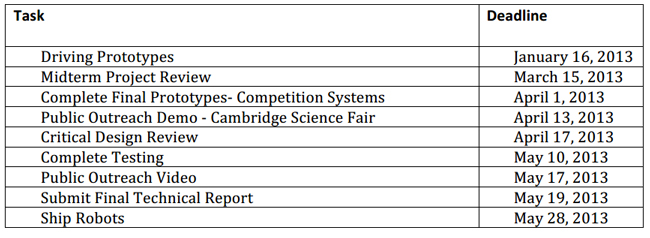
Deliverables Schedule
The content & opinions in this article are the author’s and do not necessarily represent the views of RoboticsTomorrow
Featured Product

