Adoption of Digital Twins Set to Accelerate with the Latest Release of Duality's Falcon Platform Powered by Unreal Engine

Digital twin simulation is emerging as a powerful resource for solving complex problems in AI, robotics, and smart system development. It can bring understanding of the physical world to AI models
How Simulation Can Secure Your Robotics Investment

Robotics simulation can be defined as a digital tool used to engineer robotics-based automated production systems. Essentially, robot simulation employs a digital representation to enable dynamic interaction with robot models and machines in a virtual environment.
Bringing Advanced Automation To Automotive Industry
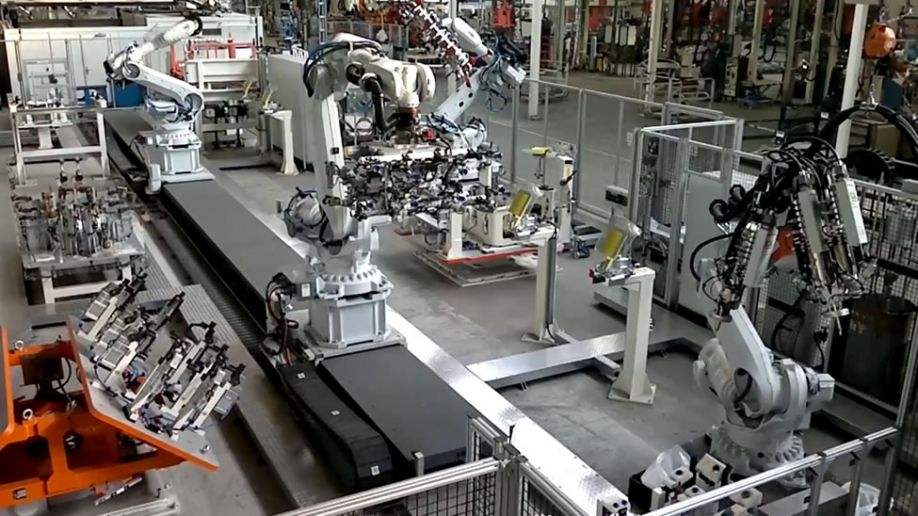
In a recent project for Mercedes-Benz (Daimler AG) RobCo S.W.A.T. used RoboDK software to simulate ABB and Motoman robots working on a range of automotive manufacturing tasks including assembly and painting.
Benefits of Developing a Palletizing Simulation

Building a simulation for a palletizing cell helps the integrator and customer start on the same page. Once rate, product, and pallet information is input into the software, realistic cycle times can be shown for any layout/configuration.
Utilizing MapleSim to Improve Assisted Living Devices
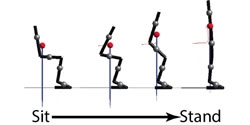
We took biomechanical data from actual human trials and applied them to a robotic model that mimics human movements when transitioning between sitting and standing positions.
How Using the Latest 3D Simulation Software for Vision Guided Robotic Applications Will Save You Time and Money
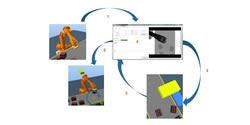
It is easy to imagine the time saved by using the latest simulation tools to develop vision guided robotic applications.
Altair and Maplesoft Partner to Embed MapleSim Modelica Engine within Model-based System Development Technology
Altair joins the rapidly growing Modelica community for multi-domain simulation
How Sensorimotor Intelligence May Develop

From Institute of Science and Technology Austria:
Robotic systems controlled by a neural network spontaneously develop self-organized behaviors. Researchers propose a novel learning rule in PNAS to explain the development of sensorimotor intelligence.
It is fascinating to observe a robot exploring its physical possibilities and surroundings, and subsequently developing different self-taught behaviors without any instructions. In their paper (DOI: 10.1073/pnas.1508400112) published on October, 26, 2015 in PNAS (Proceedings of the National Academy of Sciences), Professor Ralf Der from the Max Planck Institute for Mathematics in the Sciences, und Georg Martius, Postdoc and Fellow at the Institute for Science and Technology (IST Austria), demonstrate the emergence of sensorimotor intelligence in robots based on their proposed learning rule...
... To test their hypothesis, the authors use bioinspired robots consisting of a humanoid and a hexapod robot in physically realistic computer simulations. The robots receive sensory input from their bodies but are not given any form of instruction or task. What can then be observed is a rich spectrum of rhythmic behaviors of the robots as they explore various movements. Solely because of the tight coupling of environment, body, and brain (in this case an artificial neural network), the robots can obtain feedback from their situation and adapt quickly. This, together with a simple, learned self-model, allows them to develop a form of sensorimotor intelligence... (full article) (paper) (videos and other materials)
Simulating Clearpath Robots In Maplesim
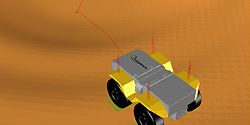
If your robotics research depends on accurate models, you may want to consider looking at MapleSim® 2015 - a high performance physical modeling and simulation tool developed by Maplesoft™.
Records 1 to 9 of 9
Featured Product

3D Vision: Ensenso B now also available as a mono version!
This compact 3D camera series combines a very short working distance, a large field of view and a high depth of field - perfect for bin picking applications. With its ability to capture multiple objects over a large area, it can help robots empty containers more efficiently. Now available from IDS Imaging Development Systems. In the color version of the Ensenso B, the stereo system is equipped with two RGB image sensors. This saves additional sensors and reduces installation space and hardware costs. Now, you can also choose your model to be equipped with two 5 MP mono sensors, achieving impressively high spatial precision. With enhanced sharpness and accuracy, you can tackle applications where absolute precision is essential. The great strength of the Ensenso B lies in the very precise detection of objects at close range. It offers a wide field of view and an impressively high depth of field. This means that the area in which an object is in focus is unusually large. At a distance of 30 centimetres between the camera and the object, the Z-accuracy is approx. 0.1 millimetres. The maximum working distance is 2 meters. This 3D camera series complies with protection class IP65/67 and is ideal for use in industrial environments.
Robotics and Automation - Featured Company

Harmonic Drive LLC
Harmonic Drive LLC (HDLLC) designs and manufactures precision servo actuators, gearheads and gear components. Harmonic Drive® gears play critical roles in robotics, medical diagnostics and surgical robotics. We work with industry-leading customers and companies of all sizes to provide both standard product and custom-engineered solutions. The majority of the products sold by HDLLC are proudly made at our US headquarters and manufacturing facility in Massachusetts.
