AI-Driven Grasp Depth Estimation

The core innovation of our new patent lies in its self-supervised approach to depth estimation. What that means is, the AI learns to judge the depth of an item it needs to pick up by using its own sensor data and the feedback it gets from its actions.
Automate 2025 Q&A with Zimmer Group

We have evolved from a manufacturer of single components to becoming a full-range provider of complex system solutions in the field of robotics. Our portfolio covers the entire automation spectrum - from high-functioning grippers to robot accessories.
Low-Cost Robotics Elevate Industrial Inspection Processes

Learn how to easily and cost-effectively design and procure turnkey automation systems using a robotics platform, taking inspection tasks to the next level.
Automating pick-and-place in food manufacturing

The requirements included automatic pick and place of up to 60 keys per minute, seamless integration with the existing production line and a minimal factory floor footprint.
DESTACO Smart Electric Product Line of Clamps and Guides

The new smart electric product line represents a substantial leap forward in the automation and industrial clamping landscape, offering enhanced precision, energy savings, and seamless integration for modern manufacturing processes.
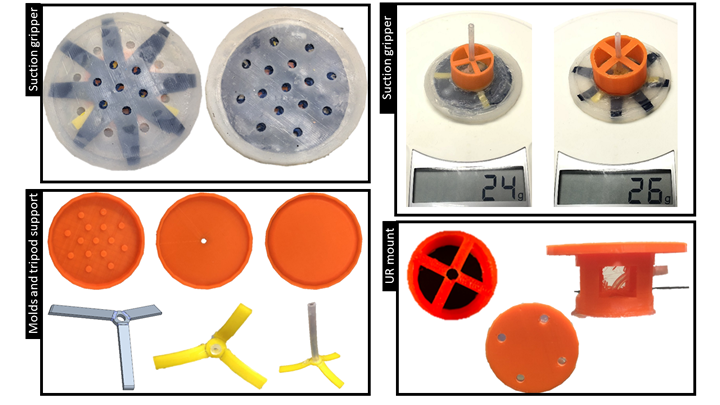
Harvestance - Developing and Designing Vacuum Grippers for Production Line Robots

Harvestance has received numerous inquiries for the design and manufacture of customized, lightweight, and strong grippers for collaborative robots, aimed at automating production lines.
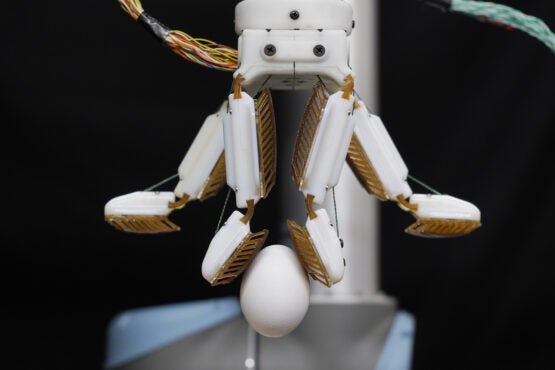
4 Ways Soft Gripper Robots Improve Food Processing

Food processors often deal with challenges when delicate items are mishandled and broken or dropped. Soft gripper robots can tackle this problem, especially since many are specially designed to handle fragile items, such as eggs.
This 3D Printed Gripper Doesn't Need Electronics To Function

This soft robotic gripper is not only 3D printed in one print, it also doesn't need any electronics to work. The device was developed by a team of roboticists at the University of California San Diego.
Sheet-Jamming Technology Revolutionizes Soft Robotics Grippers
To improve the performance of suction grippers, a new concept called sheet-jamming phenomena has been introduced. This technology has been used to create a suction gripper that is lightweight and can lift almost twice the weight of regular suction cups.
End-of-Arm-Tooling powered by Stäubli Fluid Connectors

Stäubli Fluid Connectors presents a new End-of-Arm-Tooling range: The mechatronics specialist offers a broad technology portfolio from a single source coupled with advice for individual solutions in robotic material handling.
Automatic box palletizing in the food industry

BX suction cups made of double-strength Duraflex® in combination with Piab's COAX® vacuum generation technology have enabled Tradicional Panadera to palletize different carton formats with a single gripper.
Everything Under Control

In modern systems, "pick-and-place" is performed by automated grippers. They must be able to operate both powerfully and delicately and do so precisely and reliably millions of times over. Increasingly, the necessary power comes from electric motors.
Soft Grippers Can Handle Small and Delicate Parts With Greater Ease
.jpg)
This opens up new possibilities in robotic automation and even some cutting edge robotics applications. From injection molding to strawberries and even robotic surgeries, soft gripper technology is making it easier than ever before for robots to pick up anything.
Stanford engineers develop a robotic hand with a gecko-inspired grip
Aiming to create a robotic gripper that can grasp with delicate strength, researchers combine adhesives based on gecko toes with a customized robotic hand.
4 Amazing Advancements in Robotic Grippers to Keep an Eye On
.jpg)
As manufacturing sectors of all kinds struggle with a growing labor gap, these collaborative grip designs can help streamline facility workflows, reducing the labor necessary to complete tasks while keeping the facility flexible and adaptable.
Records 1 to 15 of 65
Featured Product

ResinDek TRIGARD ESD ULTRA FOR HIGH-TRAFFIC ROBOTIC APPLICATIONS
To maximize the productivity of an autonomous mobile robot (AMR) or automatic guided vehicle (AGV) deployment, it's critical to create the optimal environment that allows the vehicles to perform at their peak. For that reason, Cornerstone Specialty Wood Products, LLC (www.resindek.com) created the TriGard ESD Ultra finish for its ResinDek engineered flooring panels. The TriGard ESD Ultra finish is ideal for high-traffic robotic applications characterized by highly repetitive movement patterns and defined travel paths.
Robotics and Automation - Featured Company

Onward Robotics
Onward Robotics delivers innovative automation technology that coordinates humans and robots as a cohesive system to revolutionize fulfillment. Our Meet Me® solution combines proprietary software with person-to-goods mobile robots to increase efficiency in warehousing, distribution, and e-commerce operations. Onward Robotics provides the boost in productivity, flexibility, and speed that companies need to remain competitive and grow.
