Sheet-Jamming Technology Revolutionizes Soft Robotics Grippers
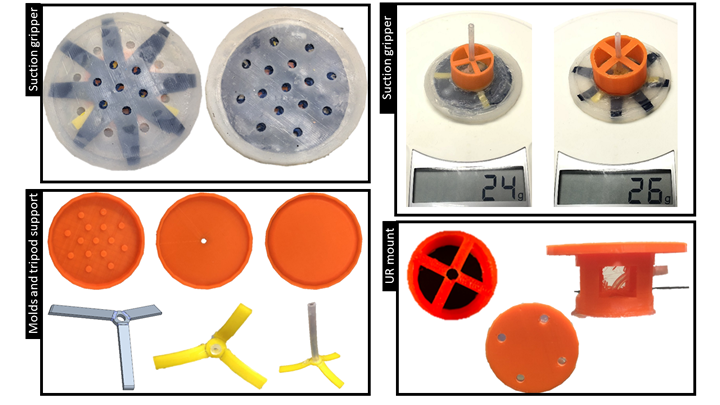
To improve the performance of suction grippers, a new concept called sheet-jamming phenomena has been introduced. This technology has been used to create a suction gripper that is lightweight and can lift almost twice the weight of regular suction cups.
Researchers develop first self-healing, electrically conducive, soft material

Carmel Majidi has engineered a soft material with metal-like conductivity and self-healing properties that, for the first time, can support power-hungry devices. Majidi's team introduced the material in three applications: a damage resistant snail-inspired robot.
Soft Grippers Can Handle Small and Delicate Parts With Greater Ease
.jpg)
This opens up new possibilities in robotic automation and even some cutting edge robotics applications. From injection molding to strawberries and even robotic surgeries, soft gripper technology is making it easier than ever before for robots to pick up anything.
Self-healing materials for robotics made from 'jelly' and salt

Researchers have developed self-healing, biodegradable, 3D-printed materials that could be used in the development of realistic artificial hands and other soft robotics applications.
Dancing with the Light: A New Way to Make Crystals Bend by Shining Light
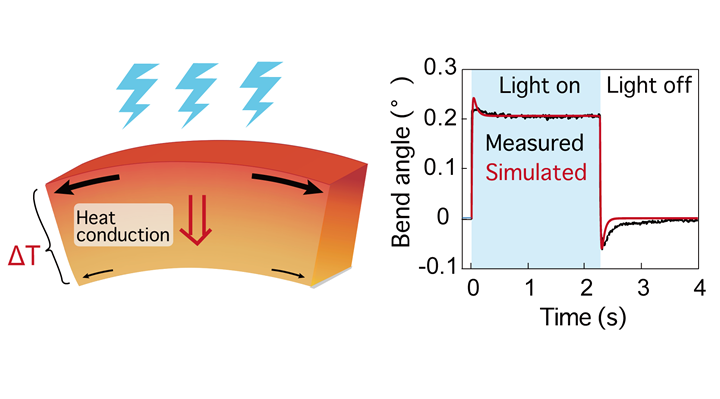
Scientists propose a novel mechanism for inducing high-speed bending in thick crystals by heating them up with light
Toyota Research Institute Shares Design to Help Advance the Field of Soft Robotics
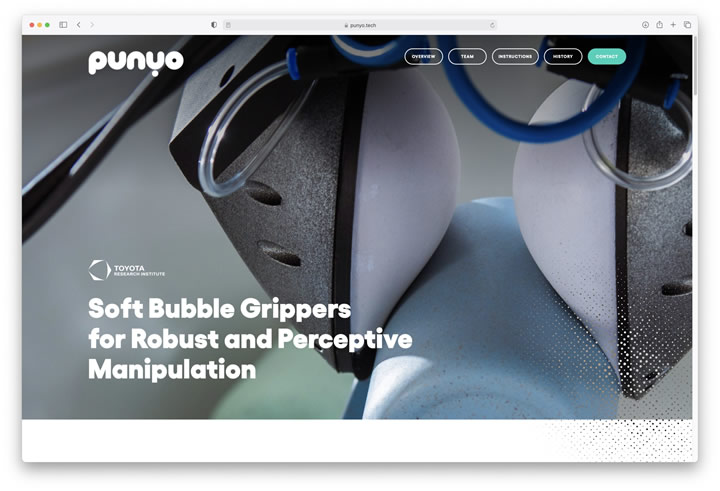
The Toyota Research Institute (TRI) is helping to accelerate the field of soft robotics by sharing the design source files and full build instruction for its innovative domestic robot hands.
Co-Learning of Task and Sensor Placement for Soft Robotics

Deep-learning technique optimizes the arrangement of sensors on a robot's body to ensure efficient operation.
The Incredible Potential of Soft Robotics

Alternatives to hard components hold potential for applications from surgery to space exploration
A Guide to Self-Healing Robots

More flexible materials are necessary for safer collaborative work alongside humans and delicate tasks usually performed by humans, such as picking fruit and vegetables or performing minor surgeries.
The Power of Adaptive Robotic EOAT

The challenge is that traditional robots have been designed to perform a single task extremely efficiently. But when the item or the task changes these traditional machines need to be reintegrated and reprogrammed.
A Step Closer to Self-Aware Machines - Columbia engineers create a robot that can imagine itself

Columbia Engineering researchers have made a major advance in robotics by creating a robot that learns what it is, from scratch, with zero prior knowledge of physics, geometry, or motor dynamics.
ASU's Southwest Robotics Symposium previews the new technology guiding the next wave of human-robot interaction

"We can rely on the brain of the human and the muscles, eyes and sense of touch of the robot in places where humans cannot, or should not, be," said Khatib. "For example, we will be able to safely repair underwater structures
"Robotics Skins" turn everyday objects into robots

Developed in the lab of Yale's Rebecca Kramer-Bottiglio, NASA-inspired robotic skins enable users to turn soft objects - a stuffed animal or a foam tube, for instance - into robots.
Soft Multi-functional Robots Get Really Small
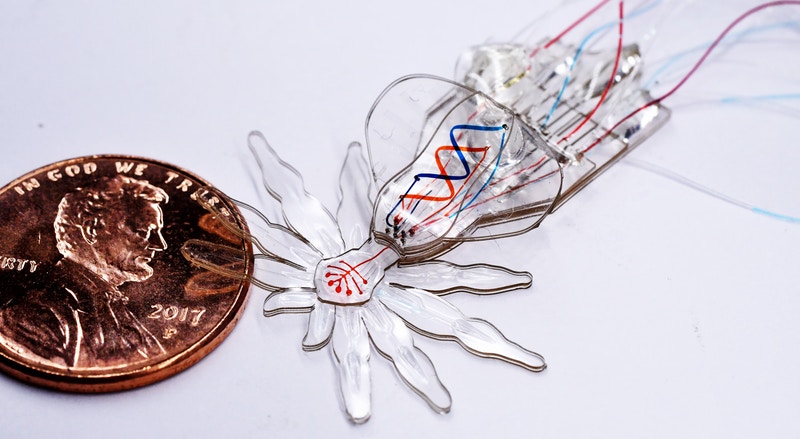
A new approach for fabricating soft materials at the millimeter scale paves the way to a new generation of flexible microrobots for medical and environmental tasks.
This Robot Has Soft Hands. It Could Be the Future of Sustainable Production

Traditional robots have been designed to perform a single task extremely efficiently. But when the item or the task changes, which is often the case with food, these traditional machines need to be reintegrated and reprogrammed
Records 1 to 15 of 42
Featured Product

IP Seals for Robots
Freudenberg Sealing Technologies' IPRS (Ingress Protection Seals for Robots) provides reliable protection for robotic systems operating in harsh environments. Designed to prevent dust, moisture, chemicals, and wear from compromising performance, IPRS extends service life and reduces maintenance. The adaptive Z-shaped geometry ensures sealing integrity under continuous motion, making it ideal for high-speed automation and outdoor applications. Manufactured with high-performance elastomers such as Fluoroprene XP and EPDM, IPRS offers exceptional resistance to lubricants, cleaning agents, and extreme temperatures. This makes it the perfect solution for six-axis robots, SCARA robots, AMRs, AGVs, and cobots.
With its low-friction design and durable materials, IPRS enhances energy efficiency and operational reliability in industrial and autonomous robotics. Learn more about our IPRS Seals
Robotics and Automation - Featured Company

DESTACO
DESTACO is now the worldwide leader in the innovation, design, manufacture and support of clamping, gripping, transferring, indexing and robotic tooling solutions for workplace and automation needs.
