The 2014 MATE competition highlights the role that ROVs play in exploring and documenting shipwrecks, studying sinkholes, and conserving our national maritime heritage sites.
L Hetherington for | RoboticsTomorrow
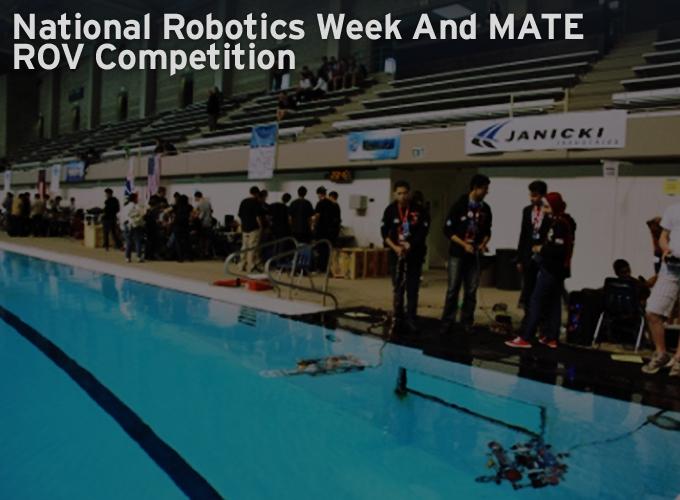
Last week was National Robotics Week. Along with other events, many regional teams competed to move forward in the 13th annual MATE underwater ROV competition:
A RUNDOWN FROM LAST YEARS EVENT:
The 2014 MATE competition highlights the role that ROVs play in exploring and documenting shipwrecks, studying sinkholes, and conserving our national maritime heritage sites.
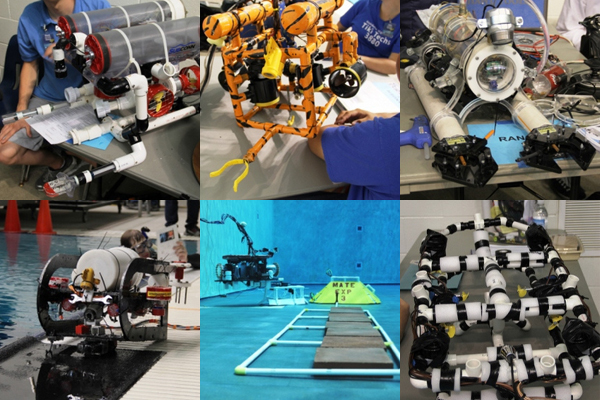
The competition is divided into 4 classes that vary depending on the vehicle specs & complexity of the mission tasks:
-
EXPLORER (advanced)(vehicle demonstration required)1
-
RANGER (intermediate)(participation in regionals required, some exceptions) 1
-
NAVIGATOR (beginner/intermediate) 2
-
SCOUT (beginner)2
1 these classes participate in the international competition
2 these classes participate in the regional contests
The 13th annual MATE international competition will take place June 26-28, 2014 at the Thunder Bay National Marine Sanctuary in Alpena, MI, USA... (full schedule of regional and international events)
The content & opinions in this article are the author’s and do not necessarily represent the views of RoboticsTomorrow
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

