Blocky: A Graphic Programming Environment for ROS
From the robotics laboratory of Ben Gurion University:
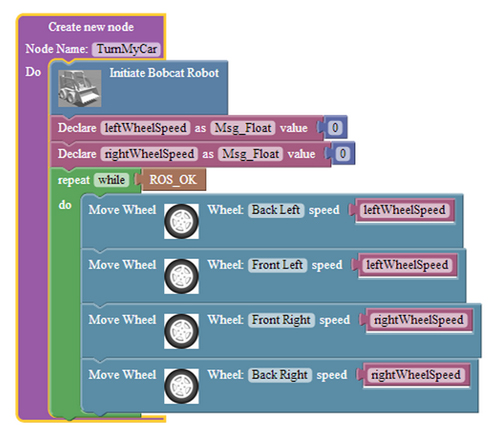
The main goal of this project it to allow users with only basic background in programming to develop software for controlling robots using ROS, this by developing a graphical interface that is user-friendly and convenient for programing to ROS. Researchers or other users often encounter a problem when come to develop a robot, they lack extensive background in programming and most of the times comes from a slightly different backgrounds (such as mechanical engineering or electrical engineering) which requires them long-term learning or rely on other professionals. The graphical interface shown in this project suggests that a researcher or a user to control a robot in a simple and more intuitive way without having to spend weeks learning the principles of ROS and without having to learn to program at all.
This project product is a web-content, generic, open source, extensible and user-friendly program that helps in the development of a ROS based robot, while providing tools for correct developing... (cont'd)
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

