Beginners Tutorial: Autonomous Robot Control Theory
From Nick McCrea at Toptal:
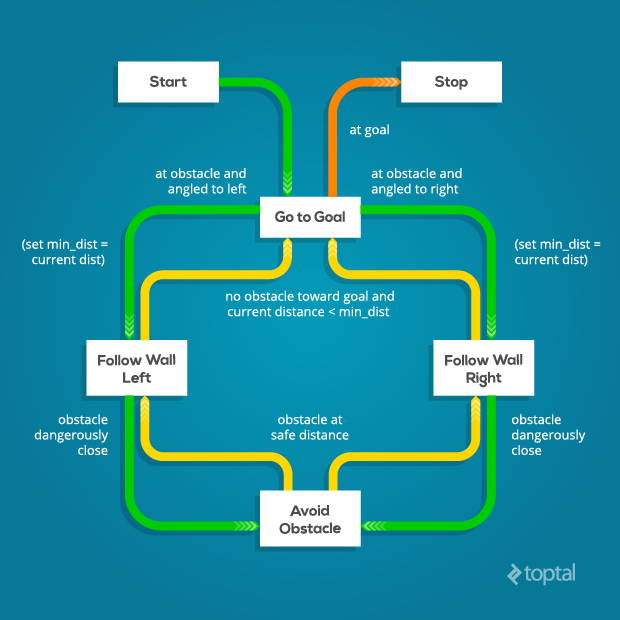
In this article, I’m going to describe the control scheme of my simulated robot, illustrate how it interacts with its environment and achieves its goals, and discuss some of the fundamental challenges of robotics that I encountered along the way... (full article)
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

Zimmer Group - THE PREMIUM GRIPPER NOW WITH IO-LINK
IO-Link is the first standardized IO technology worldwide for communication from the control system to the lowest level of automation.
