What are the motion control requirements for additive manufacturing machines?
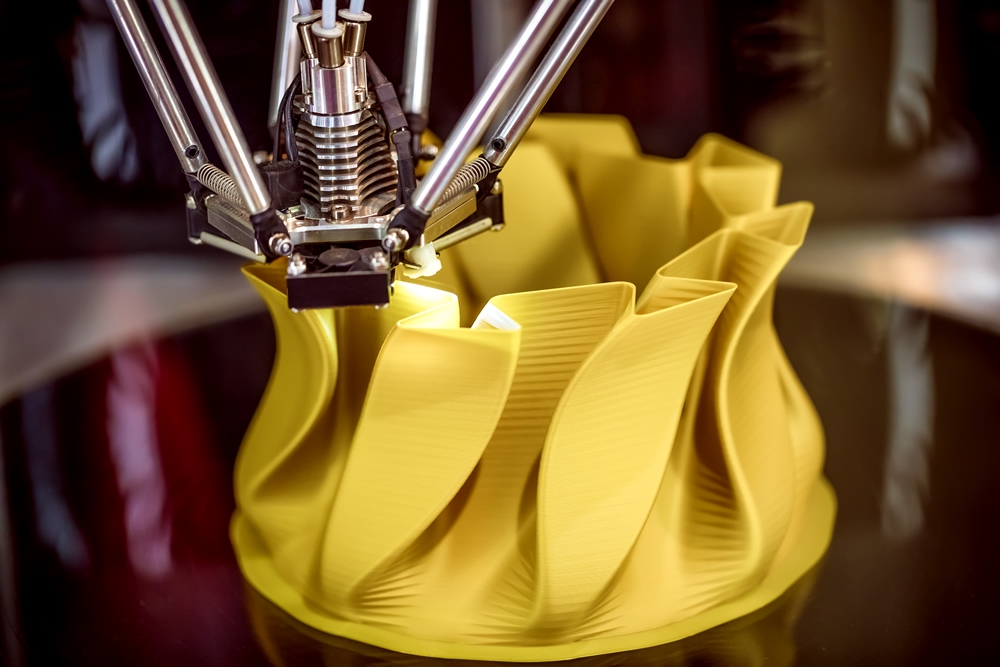
3D printed objects can include intricate machine components, through to edible items, and as a result, the additive material could range from powdered metals to chocolate. Whatever the material and shape required, functionally, the 3D printing technique is the same.
Optimizing Wheel Drives for AGVs and AMRs: What OEMs Need to Know About Motion Control

The motor and actuator selection behind each wheel can make or break the success of the entire system. In this post, we'll explore the core challenges in mobile robot drive systems and how customized motion control solutions from DINGS' Motion USA can help you meet them.
Elmo Launches New Titanium Product Line and Platinum Servo Drives at SPS 2025, Redefining Limits of Motion Control

Designed to deliver exceptional performance, industry-leading compactness, and advanced high-end technology, built for demanding industrial and harsh-environment applications.
High-Precision RV Reducers Perfectly Matched for Walking Robots
RV reducers provide extremely high rigidity, precision, and torque while maintaining a compact size and exceptional reliability, making them an ideal match for the demanding requirements of walking robot joints in terms of load capacity, impact resistance, and precision.
The Emergence of Mechatronic Subsystems and Their Importance in Product Deployment

A mechatronic subsystem is a fully integrated functional unit that combines mechanical, electrical, electromechanical, and control elements into a single pre-engineered solution.
Why Sensor Resolution Matters More Than You Think in Vibration Control

In high-precision motion control systems like those used in precision manufacturing, the terms "sensor resolution" and "servo bandwidth" are often tossed around interchangeably, sometimes even confused as being functionally synonymous. But they're not.
The Future of Underwater Robotics

Imagine a robot that can manage aquaculture projects, repair oil pipelines, and scan the seabed - all without risking human life. Nauticus Robotics' flagship robot, Aquanaut, meets these challenges while running solely on electric power.
Multi-axis motion control drives pipe-based robots

Surveying and maintaining underground pipes can be complex and resource intensive. To streamline the process, construction and facility management teams are increasingly turning to robots that can provide inspection as well as repair.
Press Brake Robots: Transforming Sheet Metal Bending with Precision and Efficiency

Press brake robots eliminate the challenges of manual sheet metal bending, such as inconsistencies, high labor costs, and workplace hazards. By leveraging robotic arms, sensors, and advanced software, these systems significantly improve accuracy and repeatability.
Developing robotic solutions: partnering for success in micro-motion control

To turn a motion concept into reality, dedicated engineering expertise can be invaluable. Not only can motion engineering support help to improve performance and reliability, but a design partnership can also optimize commercial viability - and reduce time to market.
Integrating Servo Drives with Robotics: Key Considerations for Seamless Automation
In this article, we will explore the key considerations for integrating servo drives with robotics to achieve smoother, more effective automation systems.
Fast Hexapod Improves Aircraft Manufacturing Process
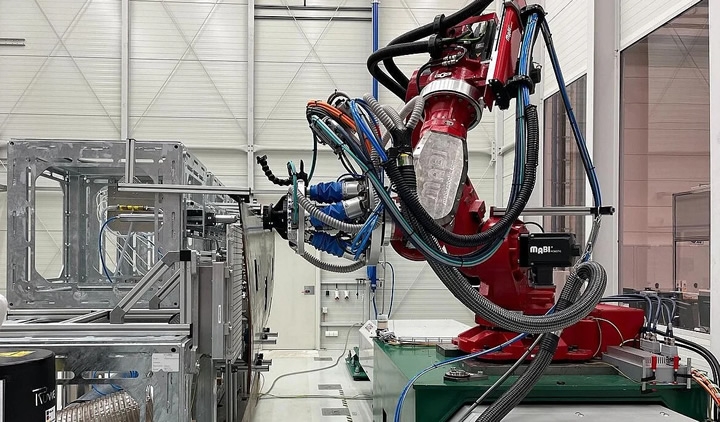
PI presented a new, high-speed hexapod at the International Aerospace Exhibition ILA Berlin in June 2024, as a partner in the LuFo VI-1: ADMAS (Advanced Machining and Sealing) research project.
What Are the Secrets to Optimizing Motion Control in Robots?

Motion control optimization is about more than ensuring a robot can move. It must also move correctly; meeting the ideal speed, power, direction, length and timing. Assurance in each of these categories is necessary because these are what separate robots from human employees
200 Times Faster Subsea Inspection
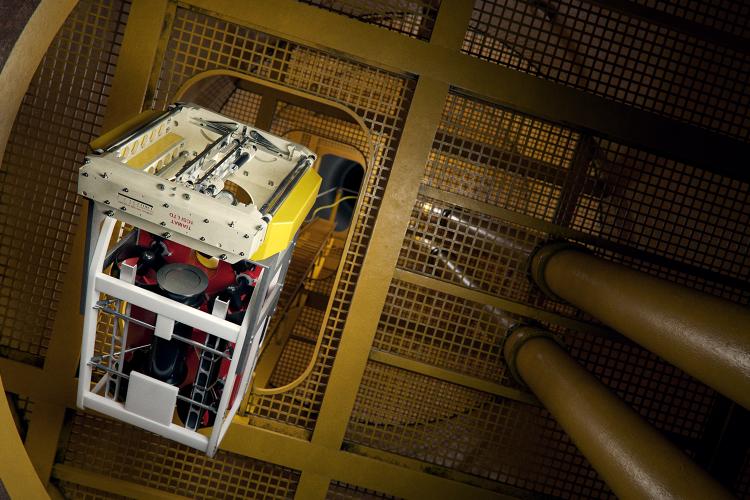
Precise motion control is helping a new subsea inspection device achieve highly accurate inspection with the fastest-yet speeds of data collection.
SUPPLIER SELECTION FOR CRITICAL MOTION CONTROL APPLICATIONS

In this article, I attempt to arm manufacturers with the questions that they need to ask to ensure that the motion control solution option chosen is right first time and up to the job. These questions should ideally focus on not just capabilities but also values.
Records 1 to 15 of 62
Featured Product

Darsi Pro - AI Compute Box based on NVIDIA® Jetson Orin™ NX
Darsi Pro is e-con Systems' rugged Edge AI compute Box powered by NVIDIA® Jetson Orin™ NX, designed for Mobility, Robotics, ITS, and physical AI applications. It delivers high-performance AI compute, supports e-con's broad camera ecosystem, and enables synchronized multi-sensor fusion for real-time perception. The Darsi Pro GMSL variant supports up to eight synchronized GMSL cameras and is compatible with NVIDIA® JetPack 6 and higher. Built with fanless design and industrial-grade enclosure, Darsi Pro is engineered for long-duty operation in harsh environments. It integrates with CloVis Central™- e-con's cloud-based device management platform for remote health monitoring, and secure OTA updates—simplifying large-scale deployment.
Robotics and Automation - Featured Company

Harmonic Drive LLC
Harmonic Drive LLC (HDLLC) designs and manufactures precision servo actuators, gearheads and gear components. Harmonic Drive® gears play critical roles in robotics, medical diagnostics and surgical robotics. We work with industry-leading customers and companies of all sizes to provide both standard product and custom-engineered solutions. The majority of the products sold by HDLLC are proudly made at our US headquarters and manufacturing facility in Massachusetts.
