Linear Actuators vs Rotary Actuators: The Core Choice for Humanoid Robot Joints
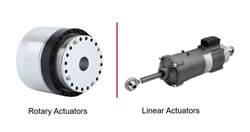
The robot joint module is the core hardware of humanoid robots, currently mainly divided into two major categories: rotary and linear. In humanoid robot designs, the choice often involves trade-offs based on the application scenario and manufacturing cost.
Game Changer in Logistics

Key work steps are being taken over by intelligent logistics robots, such as automatic storage and retrieval machines and driverless transport systems. To work efficiently and reliably around the clock, these robots need flexible and particularly compact drive solutions.
Multi-axis motion control drives pipe-based robots

Surveying and maintaining underground pipes can be complex and resource intensive. To streamline the process, construction and facility management teams are increasingly turning to robots that can provide inspection as well as repair.
Automate 2025 Q&A with maxon group

If your application requires drive systems, stop by the maxon booth to see the latest in dc brushed, brushless and geared motor technology. We offer standard, semi-custom and fully customized drive solutions and our experts are there to help guide you.
Understanding Torque and Speed in Electric Motors
The higher the torque, the greater the ability to rotate heavy objects, overcome tough resistance or to transport objects vertically. Applications which rely on high torque can include hoists and cranes, as well as industrial mixing machines.
Why this wheel drive is getting so much attention from design engineers

To simplify the development of AGVs and AMRs, ElectroCraft offers a unique, integrated wheel drive platform, which provides increased performance and reliability at an affordable price compared to traditional motor/gearbox/wheel combinations.
Robots speeding up material handling

With omnidirectional movement and smart docking with virtually any warehouse cart in under 20 seconds, these new robots are making material handling faster and safer.
At least 60 million strokes

A "compact automation" is a mechatronic system that performs a whole series of consecutive production steps autonomously. "Compact" refers to the small dimensions, in the millimeter and centimeter range, of the products to be processed.
FAULHABER MICROMO in Clearwater, Florida - Progress as a driving force

What began with an idea and the founding of a company over 60 years ago is now a company that offers and sells high-performance FAULHABER drive systems throughout the North American market.
The rise of modular robots and the importance of drive train design

As part of an in-house robot build, optimizing the drive train that powers and controls each joint is vital to the robot's performance. The most effective way of achieving this is by developing the drive train as a complete module.
The most compact Motion Control System on the market

FAULHABER is introducing a new Motion Control System. More precisely: The world's smallest Integrated Motion Controller.
Those who adapt the fastest win.

A new type of tool changer now turns the specialist for large series into a flexible all-rounder, with which even small series and individual pieces can be produced economically.
Robust Drive System Simplifies Mobile Robot Development for the Factory of the Future

Another issue is the inability of some AGVs and AMRs to drive smoothly while operating slowly, an important consideration for scenarios where the AGV or AMR itself may perform part or component assembly.
Drive Systems - Success Through Interdisciplinary Approaches

There is much more to consider than just the design and the motor selection. Interdisciplinary thinking, specific engineering knowledge, depth of experience, and a clear understanding of the requirements are critical factors.
maxon motor - Formulae Handbook for Design Engineers
The extensive collection with illustrations and descriptions includes formulas, terminology and explanations of the calculations that are relevant for drive systems. A flow chart provides assistance in selecting the right drive for each purpose.
Records 1 to 15 of 15
Featured Product

KNF - Automation Technology Requires Reliable and Durable Pumps
KNF vacuum pumps for automation applications are designed for a long service life, with micro gas pumps used as cobot pumps achieving more than 20,000 hours. The latest generation of KNF brushless DC motors has an innovative bearing design that withstands high mechanical loads. This technical strength protects the vacuum pump's longevity, especially with fast switching cycles.
Robotics and Automation - Featured Company

CMES Robotics Inc.
Powered by AI, CMES Robotics enables 3D vision for factory robots. CMES AI vision software enables robots to recognize unstructured, flexible, or deformed objects, pick them up, and loading and unloading. CMES Vision software has been deployed worldwide for random palletization and depalletization along with void filling applications. CMES Robotics automates your warehouse, logistics, and supply chain.
