Stefa Mini Solutions for Next-Generation Robotic Applications

The Stefa Mini, Cassette and Nano Seals all have smaller cross sections than comparable seals in the market today. This matters because a smaller seal allows for smaller glands (the area the seal slips into on the equipment) and smaller glands mean overall smaller equipment.
BTM INDUSTRIAL IS HOSTING AN ONLINE SALE OF INDUSTRIAL ROBOTS ON DECEMBER 17-18, 2025

Includes more than 200 robots designed to automate tasks, such as welding, manufacturing, packaging, warehousing, and food processing. This court-authorized sale requires the liquidation of all assets, regardless of price.
Humanoid Robots to Drive Billions in Rod End Sales Over the Next Decade

According to Goldman Sachs, the humanoid robot market is projected to reach $38 billion by 2035, with shipments surpassing 1.4 million units, driven by labor shortages and advancements in AI technology.
Key Factors for Ball Screw Applications

In recent years, the need for a mini ball screws has become more evident through conversations with our customers and feedback from the marketplace. Specifically, the rising demand is for high-quality ball screws that are made in the U.S and available from stock.
5 Advantages of Buying vs Making an Embedded Conveyor for OEM Applications

By outsourcing this essential component of their projects, businesses can gain a competitive edge, save valuable time, reduce costs, and benefit from the expertise of conveyor system manufacturers.
Elevating Precision Motion and Control with Magnetic Levitation to New Heights

What sets magnetic levitation apart is the ability to create a contactless, ultra-high-precision virtual bearing within our control system". Dr. Christian Rudolf provides a glimpse into the exciting development journey of PI's magnetic levitation solutions.
Designing High-ratio Drives for Precision Applications

Virtual Testing Helps Precision Gear Start-up Increase Understanding of Design Performance and Reduce Costly and Time"‘intensive Physical Prototyping
Why Rotary Encoders Might Be the Best Fit for Your Industrial Robotics Design

Encoders make industrial robots accurate enough to perform positionally accurate machining and handling tasks on large components. Let's talk about how.
Optimizing Servo System Performance: A Comprehensive Guide to Eliminating Electrical Noise and Enhancing Noise Immunity
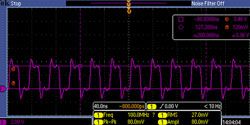
This whitepaper will delve into the steps and techniques necessary for mitigating electrical noise in servo systems, ensuring optimal performance and reliability for high-precision applications.
Drives for Speed in Intralogistics

Competitive intralogistics requires extensive automation, something that is inconceivable without micromotors. Drive systems from FAULHABER prove their ability to perform here during sorting, transporting and with robotics solutions.
ElectroCraft's MPW Wheel Drives Offer Best-in-Class Mobile Robot Solutions

If the OEM uses well-designed, proven components, the mobile platform will provide many years of service, handling cumbersome, heavy loads efficiently with minimal downtime for maintenance.
Connecting Robot Accessories to Any Industrial Network

Robots need accessories to work efficiently. But what's the easiest way to connect the accessories to factory networks? The easiest way is to use HMS Networks' ready-made Anybus products, as RSP found out.
MiniMACS6 Stabilizes the Furuta Pendulum

A classic problem in engineering is the rotational inverted pendulum. It is used to demonstrate and examine movement patterns and control algorithms in control and electrical engineering as well as in mechanical engineering. These help to control robots and other machines.
An Introduction To Plug-and-Play Motion Subsystems
If you build machines, you probably work with actuators and positioning stages every day. But do you truly get the best performance or lowest cost of ownership from these motion devices? The answer may not be what you expect.
Ways to Improve Your IMU Performance

Despite massive performance improvements, MEMS IMUs still have unique characteristics users should be aware of. By accounting for these in your system and following good IMU data practices, you can be assured the best performance for your application.
Records 1 to 15 of 66
Featured Product

ElectroCraft's Motion Control for Mobile Robots
ElectroCraft is showcasing its award-winning mobile robot technology including their powerful and compact wheel drives, high-torque-density brushless DC motors, precision linear actuators as well as servo motor drive technology at a variety of conferences and tradeshows including the Boston Robotics Summit. Robotics Summit is the premier symposium for the sharing of ideas, technology, and market developments for robotic technologies across industries. Beyond a showcase and pitch of product, ElectroCraft is eager to participate in the collaborative discussion of challenges and opportunities that will shape the near and long-term robotic marketplace.
Robotics and Automation - Featured Company

Onward Robotics
Onward Robotics delivers innovative automation technology that coordinates humans and robots as a cohesive system to revolutionize fulfillment. Our Meet Me® solution combines proprietary software with person-to-goods mobile robots to increase efficiency in warehousing, distribution, and e-commerce operations. Onward Robotics provides the boost in productivity, flexibility, and speed that companies need to remain competitive and grow.
