How to Design a Real-Time Operating System (RTOS)

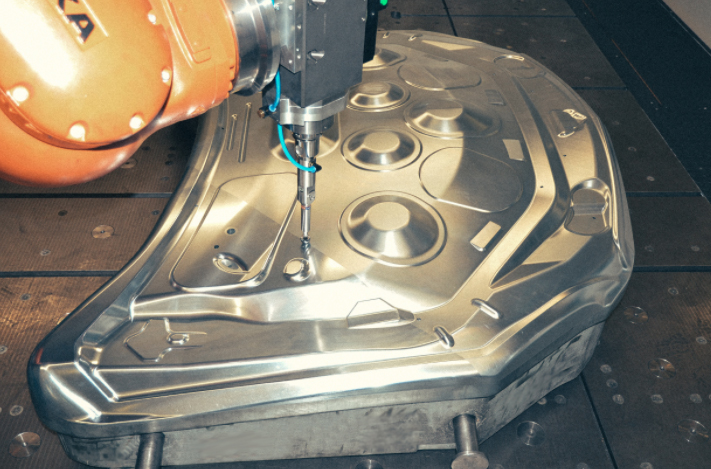
Offline Programming Software is Single Solution for Robotic Hammer Peening of Automotive Stamping Dies
Benefits of Developing a Palletizing Simulation

The Humatics Spatial Intelligence Platform

Quick Overview of 4D Graphics

Our Concept of an Open-Source Online Platform for Makers and Educators to Share Their Projects in the Robotics Makers Community

OpenConnect Launches Latest Generation of Robotic Process Automation Solution, AutoiQ
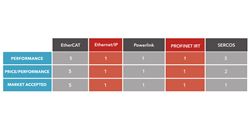
5 Real-Time, Ethernet-Based Fieldbuses Compared
As Robots Are Fast Becoming Our Co-workers, We Take A Look At When And Where This Alliance Began
.jpg)
User Case Study: MapleSim Used To Speed Up Development Of High-fidelity Robotic Manipulator Models

Drake: Robotics Planning, Control And Analysis Toolbox
Intelligrated Software announces enhancements to key warehouse execution system software module
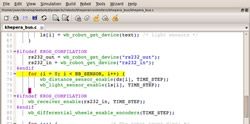
Breaking down the robot-factory language barrier
ITyX Solutions selects Orlando for its Americas headquarters
Tolomatic launches new website featuring streamlined user interface
Records 16 to 30 of 40
First | Previous | Next | Last
Featured Product

Robotmaster 2024
Robotics and Automation - Featured Company

