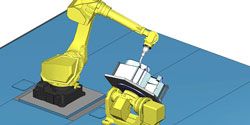
Offline Robot Programming for Polishing Aircraft Engine Lipskins

In 2020, McStarlite invested in automation by integrating a KUKA robot coupled with Robotmaster offline robot programming (OLP) software, to perform the lipskin polishing application.
Why Use Offline Robot Programming Software and How to Get Started
If you have added manufacturing robots to your facility, you are already aware of the advantages they provide and the ROI. Robots do have a downside, however, when it comes to programming-most of the time, they must be offline to be updated or programmed.
Access Control Key to Cybersecurity in B2B eCommerce

Using Access Control Lists (ACLs) to establish rules that grant or deny access to different data types includes sensitive data. Every user in an application has a role, and every role has a set of permissions configured to perform or restrict actions to entities and system capabilities.
Boxed Bot QBox Software from Quest

The Boxed Bot is extremely flexible, allowing an operator to design and produce exact pallet patterns quickly and easily from bags to boxes and other product types, and does so with a small footprint starting at just 8'x10'.
Advancing AI to Get Robots to Work With Humans

CEO Jeff Linnell brings an unorthodox approach to robotics. Part Cinematographer, part Creative Director and part self-taught Engineer, Jeff is a serial robotics entrepreneur and a thought leader.
Brain Corp Expands AI Applications into Europe with Nilfisk Partnership

BrainOS isn't just autonomous navigation. It's a comprehensive solution that provides a full suite of core robotic technology "building blocks" that help producers of autonomous machines focus on their own core competencies.
Why Software will win the Race for Autonomy

Freedom to operate is vital and it takes on new meaning in the sphere of vehicle autonomy. To drive mass adoption of autonomy, you need to build vehicle software that enables any vehicle to operate in any environment, with zero dependence on external systems.
MIRAI - Using AI to Train Robotic Arms

MIRAI learns by watching demonstrations: a human guides the robotic arm through various motions, MIRAI watches, generalizes and learns to solve the same task autonomously.
Next-Gen Robots Powered by Data Fueling Manufacturing Efficiency

As the continued e-commerce wave drives industry-wide pressure to deliver orders on time, there has been an explosion of cobot startups focused on improving the efficiency of picking and packaging boxes of mixed items.
BrainOS for Commercial Robotic Navigation

For commercial robotics-where hitting a wall or a person with an 800-pound machine would be catastrophic-being confident that the robot is safe, secure, and well supported is critical.
Removing Production Bottlenecks Through Automation
Universal Robots and OCTOPUZ work together to automate Fibrelines manufacturing process while providing flexibility for the future.
Preparing Students for the New Industry Standard
(1).png)
Offline Robot Programming is a technology that is quickly being implemented in manufacturing facilities all over the globe. This implementation results in an increase in efficiency, time and cost savings, and results in less down time.
Are You Still Manually Programming Your Robot? Why Not Fully Automate!
Focus Auto Design Inc. originally purchased a used robot two years ago to make the jump into automating their business. However, they were manually programming this robot which took time and resources that held their business back from its optimal performance.
RTOS for Safety Critical Systems

Designing the right RTOS architecture requires delicate attention and decisions. Basic real-time operating system services such as inter-process communication, process synchronization, process management and interrupt handling must unfold efficiently.
What is a Botnet?
A bot herder, is an individual who controls and maintains a botnet by installing malicious software in many computers, placing these devices under his/her control. These "herds" of bot machines, also called zombies, can then be used to attack or infect other computers.
Records 1 to 15 of 40
Featured Product

Palladyne IQ - Unlocking new frontiers for robotic performance.
Palladyne IQ is a closed-loop autonomy software that uses artificial intelligence (AI) and machine learning (ML) technologies to provide human-like reasoning capabilities for industrial robots and collaborative robots (cobots). By enabling robots to perceive variations or changes in the real-world environment and adapt to them dynamically, Palladyne IQ helps make robots smarter today and ready to handle jobs that have historically been too complex to automate.
Robotics and Automation - Featured Company

Encoder Products Company
At Encoder Products Company, we specialize in the encoders that provide you with motion feedback. EPC has been a leading designer and manufacturer of motion sensing devices for more than 50 years, we understand that each industrial automation application is different, and you need encoders that fit the needs of your applications. Our encoders are highly configurable, offer an array of shaft or bore sizes, output types, connector types, mounting options, and resolutions as high as 65,536 CPR.
