PILLARS OF TOMORROW - A hopeful vision of Government, Technology, and Human Dignity in harmony

For centuries, visions of the future have been dominated by dystopian warnings—cautionary tales of power gone wrong. Five Pillars of Tomorrow offers an alternative: a governance model where transparency, collective wisdom, and advanced AI safeguard human dignity.
Beyond the Humanoid Hype: Why Collaborative Mobile Robots Are the Real Factory Floor Revolution

Collaborative mobile robots are already delivering measurable results for companies across a variety of industries, and they're fulfilling promises that the sci-fi-esque robots can only dream of one day tackling.
More Washing Machines, Fewer Robot Housekeepers

What the field needs is not more capital or bigger promises, but better frameworks for evaluating ideas and guiding innovation. If we can measure opportunities against these structures, robotics can finally move from flashy demonstrations to truly transformative technologies
Sensing the Shift: Trends in Smart Industrial Automation
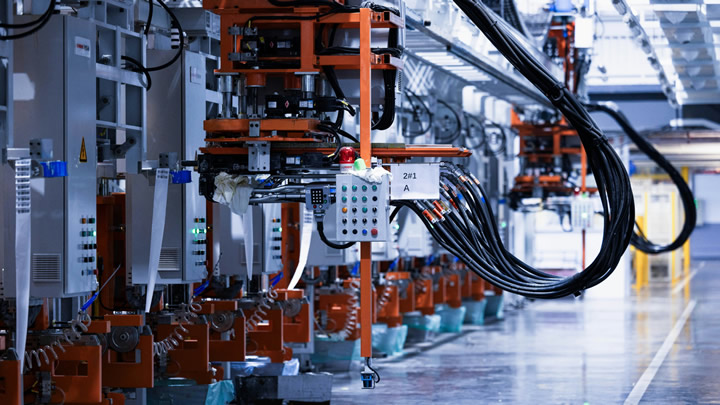
Cutting-edge robotics, sensors, edge computing, IoT and more are at the forefront of smarter manufacturing, bringing together the technology, infrastructure and innovation that power modern automation.
The Battery Bottleneck Holding Robotics Back
In this conversation, he explains how energy needs vary across robot categories, why current systems are holding back innovation, and what battery breakthroughs could mean for the future of robotics.
Starship Technologies Surpasses 8 Million Deliveries

With operations across multiple countries and US university campuses, Starship is now the undisputed global leader in autonomous delivery, both in scale and in real-world deployment.
Top 5 trends for the AIoT industry in 2025

This year, we dive deeper into the trends driving AIoT, showing how they are reshaping industries and fostering a more efficient, secure, and sustainable future.
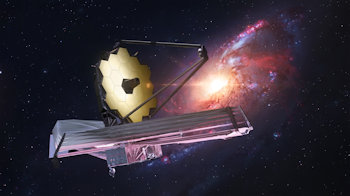
IEEE Reveals Predictions for Top Technology Trends of 2025

From leveling the AI playing field to advancing drone technology and medical diagnostics via wearables, 2025 will deliver new, efficient computer science-based solutions for consumers and businesses
Factories of the future - What will manufacturing facilities look like in 2044

The landscape of manufacturing is set to evolve dramatically over the next two decades, as cutting-edge technologies redefine the way we produce goods. To envision what the future may look like, we do not need to rely solely on idle speculation.
Four predictions for 2024: AI set to supercharge robotic automation

We've reached that point in the year when it's time to reflect upon the trends from the past 12 months, while looking ahead at what 2024 has in store for the world of robotics and automation.
What's in store for 2024: Top 5 industry trends
.jpg)
The manufacturing industry is undergoing significant changes due to the swift advancement of technology and evolving global dynamics.
TONOMUS announces new 'next billion' competition targeting innovative ideas to enable tomorrow's cognitive communities

Winners will be invited to incubate their ideas with advice and guidance from venture studio experts, strengthening TONOMUS' portfolio of innovative cognitive technologies
Year in Review: 2022's Top New and Emerging Technologies
With another year over and more global issues to address, not only are there many technologies and innovations to reflect on this year, but there are also exciting new developments on the horizon for 2023.
BitFlow Identifies Five Machine Vision Trends for 2023

Today, the market for machine vision worldwide is over $14 billion (USD). Annual growth is pegged at approximately eight percent for machine vision cameras, lens, frame grabbers, processors, and software with no signs of slowing.
Mouser Gives a Closer Look at Autonomous Mobile Robots in New Installment of Empowering Innovation Together
The final installment of Mouser's 2022 Empowering Innovation Together program explores the cutting-edge applications of autonomous mobile robots and includes a new episode of The Tech Between Us podcast.
Records 1 to 15 of 137
Featured Product

ResinDek TRIGARD ESD ULTRA FOR HIGH-TRAFFIC ROBOTIC APPLICATIONS
To maximize the productivity of an autonomous mobile robot (AMR) or automatic guided vehicle (AGV) deployment, it's critical to create the optimal environment that allows the vehicles to perform at their peak. For that reason, Cornerstone Specialty Wood Products, LLC (www.resindek.com) created the TriGard ESD Ultra finish for its ResinDek engineered flooring panels. The TriGard ESD Ultra finish is ideal for high-traffic robotic applications characterized by highly repetitive movement patterns and defined travel paths.
Robotics and Automation - Featured Company

Zimmer Group US, Inc.
Are you interested in premium products in the fields of mechanical and plant engineering? Do you want to learn more about our solutions in the fields of automation, damping, linear, processing, tooling, and machine tooling technology?
