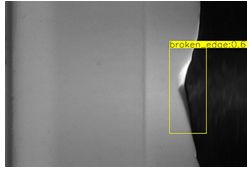
Utilizing AI in the Manufacturing Space
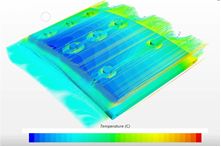
AI and AM: A Powerful Synergy
Security Must Be Addressed Before Autonomous Delivery Can Thrive

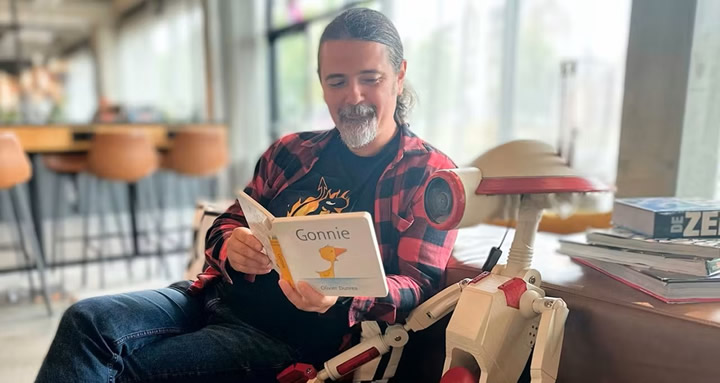
Meet the Maker: Developer Taps NVIDIA Jetson as Force Behind AI-Powered Pit Droid
Sarcos and Blattner Company Sign Agreement for Development of Autonomous Robotic Solar Construction System

7 Reasons Robots Make a Huge Difference in Food Processing

Robotic Chef 'Beastro™' takes Orders, Cooks-and Cleans up--controlled by Unitronics

CHIPOTLE PARTNERS WITH VEBU TO TEST AUTOCADO PROTOTYPE, A ROBOTIC SOLUTION TO GUACAMOLE PREP

Challenges in Drone Technology

How Construction Companies Are Automating Workflows

Mori3 - Walking quadruped

How to Reduce Chatter in Robotic Milling Applications
.jpg)
Choosing a Robotic Spindle for Deburring

Mirokaï, A Revolution in Robotics

Record-Breaking Crowds Celebrate Youth Robotics Teams & STEM Innovation at FIRST® Championship in Houston

Records 16 to 30 of 716
First | Previous | Next | Last
Featured Product

