Elevating Precision Motion and Control with Magnetic Levitation to New Heights

What sets magnetic levitation apart is the ability to create a contactless, ultra-high-precision virtual bearing within our control system". Dr. Christian Rudolf provides a glimpse into the exciting development journey of PI's magnetic levitation solutions.
Case Study: Delta Line Motion System Solutions for Robotics

Delta Line motors, particularly those in its rapidly expanding frameless range, offer exceptional power density and are well suited to meet the need for compact yet powerful motion solutions.
Drives for Speed in Intralogistics

Competitive intralogistics requires extensive automation, something that is inconceivable without micromotors. Drive systems from FAULHABER prove their ability to perform here during sorting, transporting and with robotics solutions.
The Importance of the Speed-Torque Gradient in DC Motor Sizing
.jpg)
The speed / torque gradient is an indicator of a motor's performance. The smaller the value, the more powerful the motor and consequently the less motor speed varies with load variations. It is based on the quotient of ideal no-load speed and ideal stall torque.
Understanding the Motor Constant in DC Motor Sizing
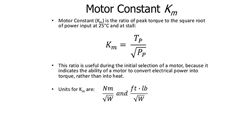
One of the most often overlooked parameters of direct current motors (both brush and brushless) is the Km or motor constant. The motor constant (expressed as Km) defines the ability of a motor to transform electrical power into mechanical power.
RoboticsTomorrow.com - Q&A with ElecroCraft

We provide motion control solutions in the form of electric motors, drives and motion control solutions for OEM Customers who are unsatisfied with having to design around inflexible off-the-shelf products.
Slotless Brushless Servo Motors Improve Machine Performance.

From the outside it looks just like any other industrial brushless servo motor but inside it utilized advanced manufacturing techniques to provide higher torque, higher speed, smoother operation, higher efficiency, and better inertial matching in a smaller package.
Power Density in Robotics
.jpg)
One of the basic requirements for the drives of mobile robots is high power density. For robots, this usually means high torque while taking up the smallest possible space.
Understanding Torque Ripple in Servo Motors
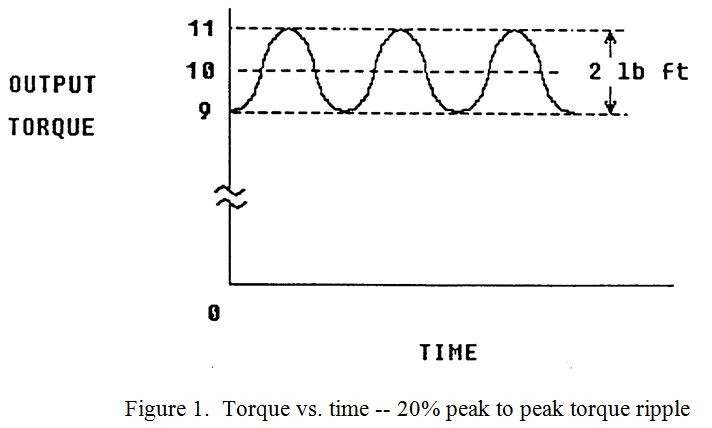
Torque ripple must be defined as a function of output load and speed. For load specification the most sensible rating point is the continuous duty thermal torque rating for the servo motor.
These Robots Crawl Into Every Nook and Cranny

The latest addition is a small crawler robot that magnetically "sticks" to metal walls and is able to move in all directions. It carries cameras, sensors and tools for inspection or maintenance work in tight pipes and on the outer hulls of tanks or ships.
Forms of Closed Loop Stepper Control
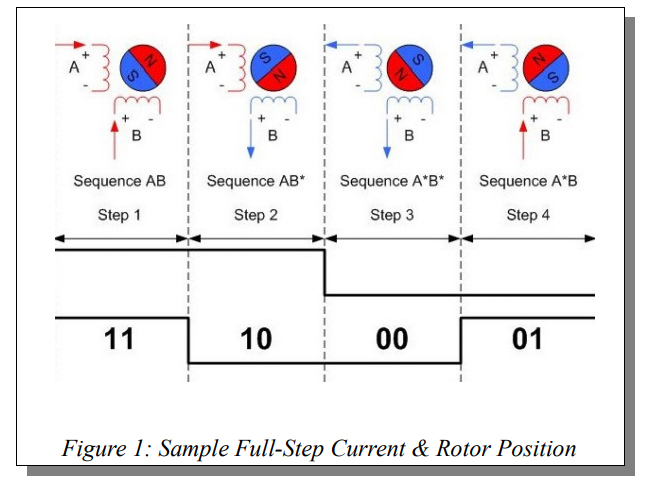
2017 - Most Popular Article - To achieve the highest performance, the stepper motor can be treated as a 2 phase brushless servo motor. Current to the motor will then be controlled as a function of the error signal just as with standard servo motors.
Encoder Selection: Speed Control
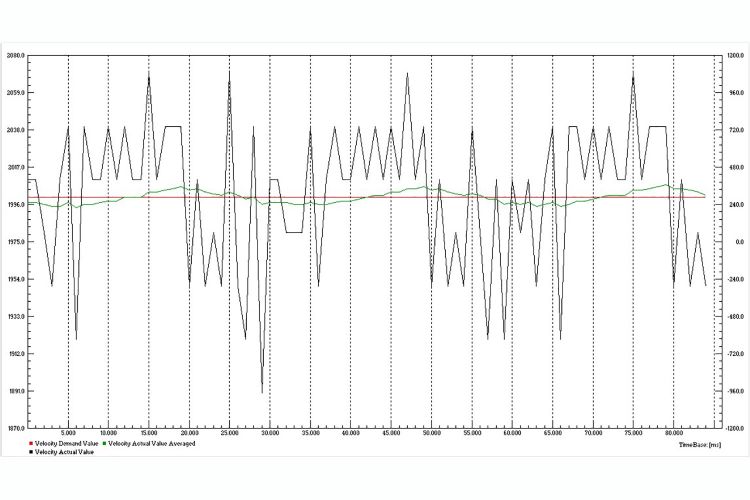
A general in depth analysis shows that the highest encoder resolutions are required for very precise speed control. The encoder resolution increases with the square of the demanded speed accuracy.
Development of Battery-Free Multi-Rotation Absolute Encoder

In recent years, there have been many demands for equipment with high productivity to have a system that retains positioning information, even after the main power supply is turned off.
Records 1 to 13 of 13
Featured Product

ResinDek TRIGARD ESD ULTRA FOR HIGH-TRAFFIC ROBOTIC APPLICATIONS
To maximize the productivity of an autonomous mobile robot (AMR) or automatic guided vehicle (AGV) deployment, it's critical to create the optimal environment that allows the vehicles to perform at their peak. For that reason, Cornerstone Specialty Wood Products, LLC (www.resindek.com) created the TriGard ESD Ultra finish for its ResinDek engineered flooring panels. The TriGard ESD Ultra finish is ideal for high-traffic robotic applications characterized by highly repetitive movement patterns and defined travel paths.
Robotics and Automation - Featured Company

Robotmaster
Robotmaster, a Hypertherm Associates brand, is an offline, is an offline robot programming software that helps manufacturers maximize their robot's productivity with easy and efficient robot programming for a variety of applications such as cutting, trimming, milling, welding, spraying, polishing, sanding, grinding, deburring, and more.
Robotmaster uses integrated CAD/CAM functionality to make robotic programming easy and intuitive for everyone, even first-time users.
