10 Different Options For Controlling Linear Actuators

Design and Operation Features of a BDC Motor Controller

Dual Loop Control: No More Gear Backlash

Motor Commutation: FOC vs. FEC

6 Ways to Use a Bottomless Conveyor

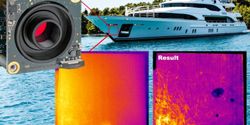
Under the Surface - Non-destructive Testing of Composite Materials
Getting the Right Grip: Designing Soft and Sensitive Robotic Fingers

3DMGQ7-GNSS/INS Dynamic Performance Test Report

Integrated Wheel Drives Lower Cost of Mobile Robot Ownership

Precision Micromotors in Defence Robots

Without Micromotors Global Logistics Would Be Lost

The Claxon Platform, a Quad CXP-12 PCIe Gen3 Frame Grabber

A Lot of Power in a Very Small Space

The Importance of the Speed-Torque Gradient in DC Motor Sizing
.jpg)
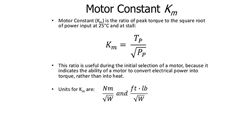
Understanding the Motor Constant in DC Motor Sizing
Records 31 to 45 of 65
First | Previous | Next | Last
Featured Product

New incremental encoder IERF3 L from FAULHABER
Robotics and Automation - Featured Company

